
иҝ‘жңҹпјҢе·ҘеӯҰйҷўеј еҶӣеӣҪж•ҷжҺҲзүөеӨҙзҡ„жһ—жңЁиө„жәҗй«ҳж•Ҳз”ҹдә§е…ЁеӣҪйҮҚзӮ№е®һйӘҢе®Өжһ—дёҡжҷәиғҪеҢ–иЈ…еӨҮз ”з©¶з»„пјҢеңЁжңәеҷЁдәәиҮӘдё»иҝҗеҠЁеҶізӯ–йўҶеҹҹеҸ–еҫ—ж–°иҝӣеұ•пјҢз ”з©¶жҲҗжһңд»Ҙ вҖңEvent-triggered Reconfigurable Reinforcement Learning Motion-planning Approach for Mobile Robot in Unknown Dynamic EnvironmentsвҖқдёәйўҳеҸ‘иЎЁдәҺеӣҪйҷ…дәәе·ҘжҷәиғҪйўҶеҹҹзҡ„и‘—еҗҚжңҹеҲҠгҖҠEngineering Applications of Artificial IntelligenceгҖӢпјҲдёӯ科йҷў2еҢәTOP, IF=7.802пјүгҖӮ
иҝ‘е№ҙжқҘпјҢжңәеҷЁдәәжҠҖжңҜдёҺејәеҢ–еӯҰд№ зҡ„з»“еҗҲе·ІжҲҗдёәиҜҘйўҶеҹҹзҡ„еүҚжІҝ科жҠҖд№ӢдёҖпјҢ并йҖҗжӯҘжҺЁеҠЁдәҶдәәзұ»зӨҫдјҡз”ҹдә§е’Ңз”ҹжҙ»ж–№ејҸзҡ„иҪ¬еҸҳгҖӮејәеҢ–еӯҰд№ еҲ©з”Ёж•°жҚ®й©ұеҠЁзҡ„ж–№ејҸжқҘжҸҗеҚҮжңәеҷЁдәәзі»з»ҹеҜ№еӨҚжқӮзҺҜеўғзҡ„еә”еҜ№иғҪеҠӣпјҢдҪҶйҡҸд№ӢиҖҢжқҘд№ҹеҮәзҺ°дәҶеӯҰд№ жҲҗжң¬иҝҮй«ҳе’ҢиҮӘдё»еҶізӯ–зЁіе®ҡжҖ§дёҚи¶ізҡ„йҡҫйўҳгҖӮ
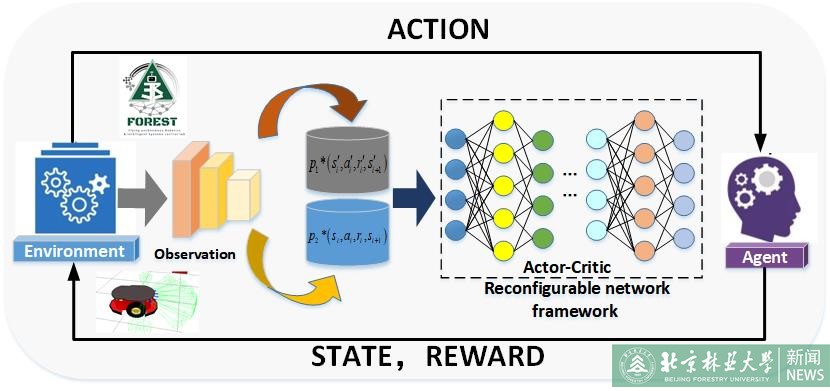
дёәдәҶжҸҗеҚҮ移еҠЁжңәеҷЁдәәеңЁжңӘзҹҘзҺҜеўғдёӯзҡ„иҮӘдё»еӯҰд№ е’Ңй«ҳж•ҲеҶізӯ–иғҪеҠӣпјҢиҜҫйўҳз»„ејҖеҸ‘дәҶдёҖз§ҚеҹәдәҺдәӢ件й©ұеҠЁзҡ„ж·ұеәҰзЎ®е®ҡжҖ§зӯ–з•ҘжўҜеәҰ(RS-DDPG)иҝҗеҠЁи§„еҲ’ж–№жі•гҖӮеҲ©з”Ёж ·жң¬йў„еӨ„зҗҶжҠҖжңҜе’ҢиҮӘйҖӮеә”еҘ–еҠұжңәеҲ¶пјҢи§ЈеҶідәҶејәеҢ–еӯҰд№ зҪ‘з»ңй•ҝжңҹеӯҳеңЁзҡ„еҘ–еҠұзЁҖз–Ҹе’Ң收ж•ӣеӣ°йҡҫзҡ„й—®йўҳпјҢдҝғиҝӣдәҶжңүйҷҗж ·жң¬иө„жәҗзҡ„й«ҳж•ҲеҲ©з”ЁгҖӮз»“жһңиЎЁжҳҺпјҢйҮҚжһ„ејәеҢ–еӯҰд№ зі»з»ҹеӨ§е№…еҮҸе°‘дәҶзӯ–з•Ҙи®ӯз»ғж—¶й—ҙпјҢеҸҜйқ жҖ§иғҪй«ҳпјҢеҸҜд»ҘеңЁйқһз»“жһ„еӨҚжқӮзҺҜеўғдёӯзІҫеҮҶеҶізӯ–гҖӮиҜҘйЎ№з ”з©¶еҜ№з§»еҠЁжңәеҷЁдәәеңЁйқһз»“жһ„зҺҜеўғдёӯзҡ„иҮӘдё»еҜјиҲӘе’Ңзӣ®ж Үжҗңзҙўзӯүд»»еҠЎе…·жңүжҪңеңЁзҡ„еә”з”Ёд»·еҖјгҖӮ
жң¬ж–Ү第дёҖдҪңиҖ…дёәе·ҘеӯҰйҷўеҚҡеЈ«з”ҹеӯҷиҫүиҫүпјҢйҖҡи®ҜдҪңиҖ…дёәиғЎжҳҘй№ӨеүҜж•ҷжҺҲе’Ңеј еҶӣеӣҪж•ҷжҺҲпјҢеҢ—дә¬жһ—дёҡеӨ§еӯҰдёә第дёҖе®ҢжҲҗеҚ•дҪҚгҖӮиҜҘе·ҘдҪңеҫ—еҲ°дәҶеӣҪ家иҮӘ然科еӯҰеҹәйҮ‘(61703047)иө„еҠ©гҖӮ
ж–Үз« й“ҫжҺҘпјҡhttps://www.sciencedirect.com/science/article/pii/S0952197623003810?via%3Dihub